

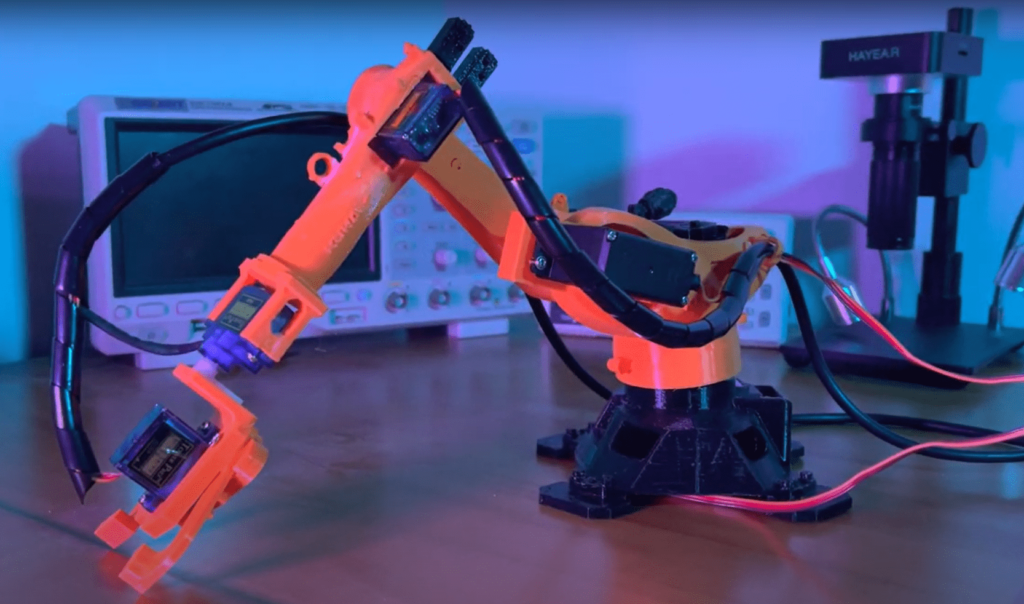
En este blog vamos a crear un brazo robot con aparaciencia del modelo KUKA industrial, vamos a ver las partes necesarias para impresion 3d y un ejemplo basico en arduino creado con chatGPT.
Miraremos los elementos necesarios para este proyecto, en caso de que necesites una base para realizarlo.
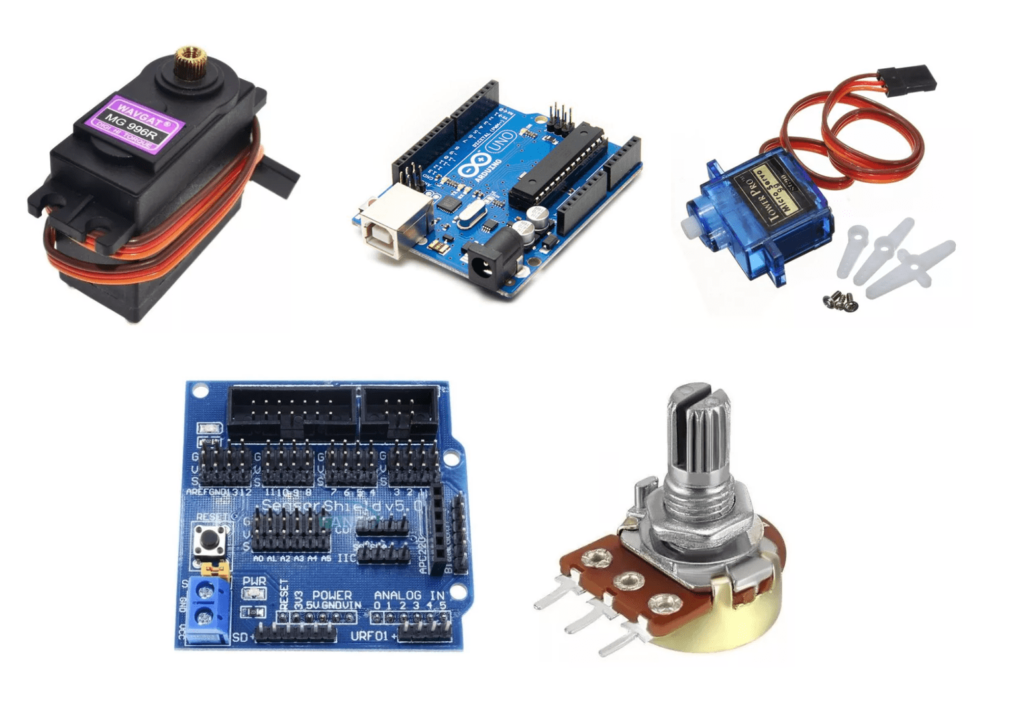
1. Elementos necesarios
- 2 x servo motores Mg996r
- 3 x Servo motores Sg90
- 1 x Arduino Uno
- 1 x Sensor Shield Arduino uno
- 5 x Potenciometros de 5K
Ahora, los siguientes elementos a tener en cuenta son las impresiones en 3d, no te preocupes las puedes descargar Github
2. Elementos Funcionales


3. Elementos Decorativos

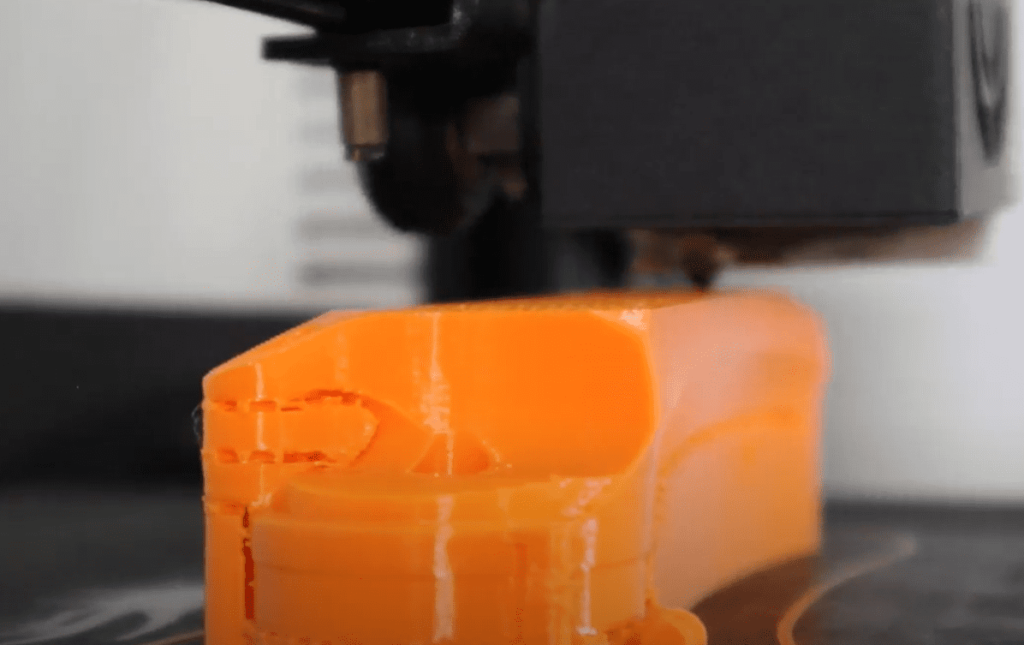
Cada uno de estos elementos se debe imprimir en el filamento de preferencia, en nuestro caso utilziamos PLA de color naranja y negro en una impresora ENDER3.
4. Impresión en ENDER 3

5. Septup Motores
Los servomotores hay que configurarlos antes de iniciar el ensamblado de las piezas, estos servo motores se deben llevar a 90° con el fin de dejar movimiento libre hasta 0° o 180° y no sea un problema para las partes moviles ni dañar las impresiones por no hacer este paso previo.
Existen 2 maneras de hacerlo, la primera es realizarlo con arduino directamente, aca les dejo el codigo necesario

#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(90);
}La segunda forma de realizarlo es con un probador de servos, en mi caso lo realice con esa plaquetica y se puede configurar por medio del potenciometro.

6. Armado
Primero empezamos con la base, debemos usar un motor de los Mg996r, si queda muy ajustado, deberas limar un poco los bordes, eso depende de la tolerancia de cada impresora 3d.

Para asegurar la segunda parte del brazo, debes usar el engranaje que viene en el paquete del motor.

Y debes centrarlo en la siguiente pieza
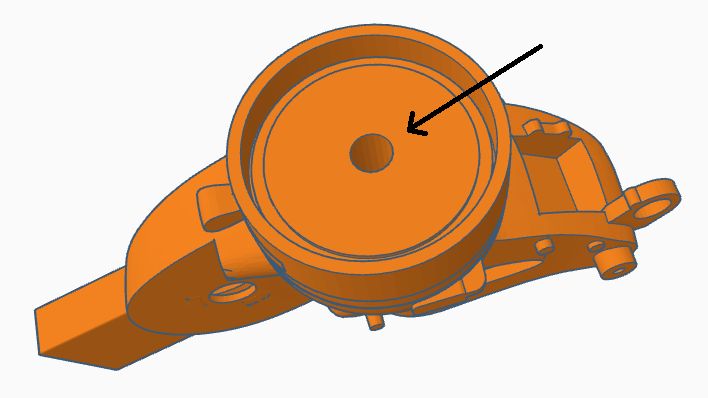
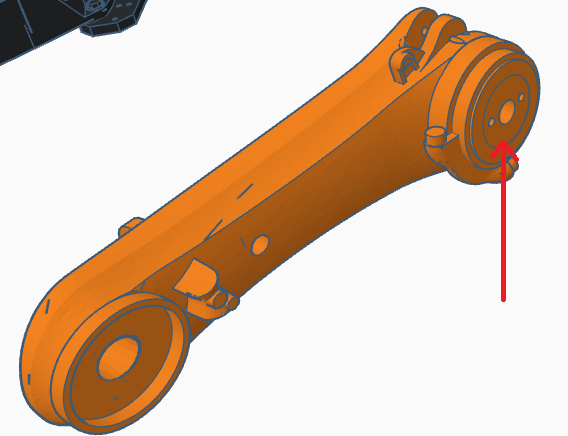
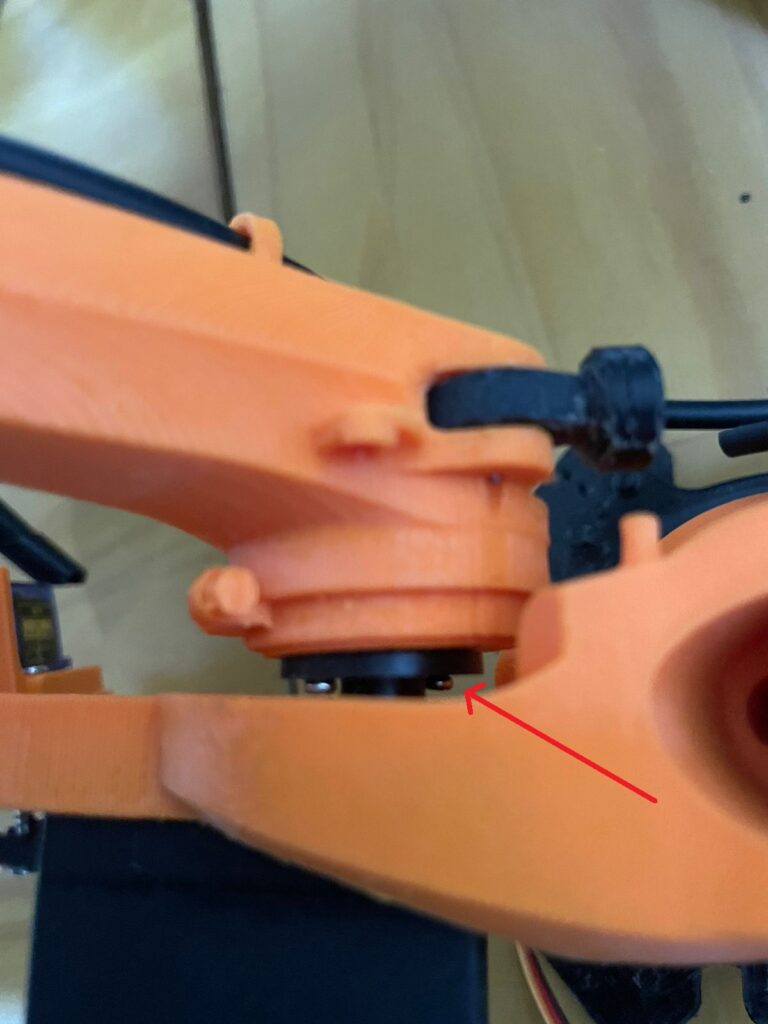
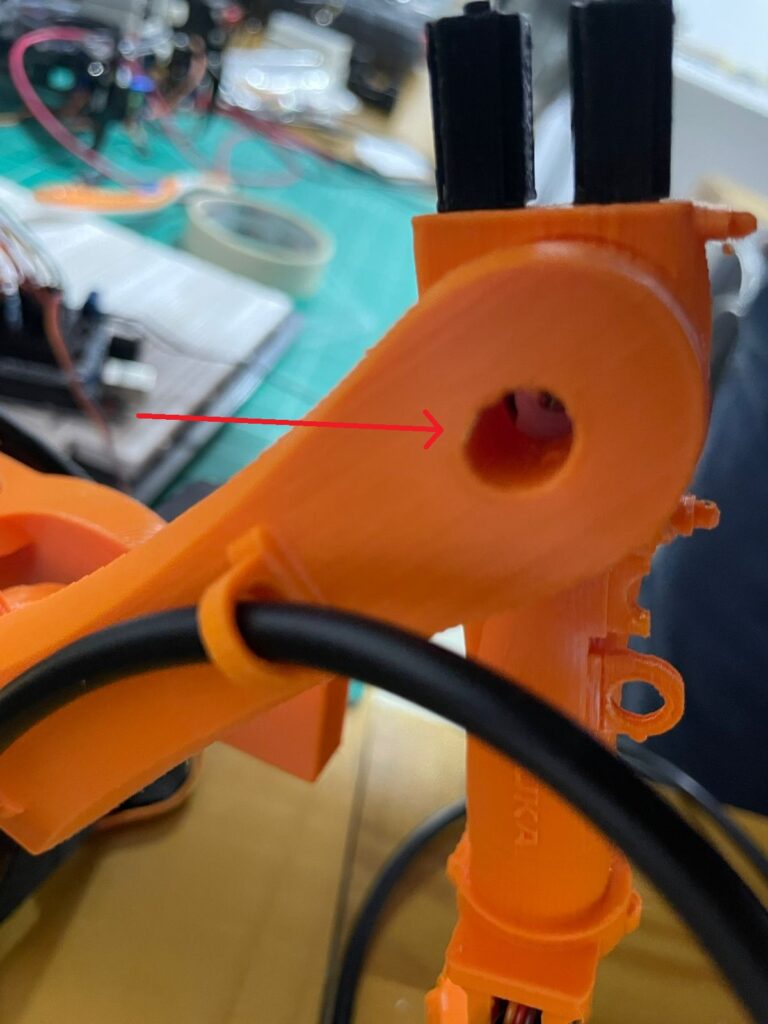
Cada una de las partes cuenta con un agujero que permite apretar el tornillo que asegura al eje de cada servo motor. Al final debe verse similar a la siguiente foto. En la flecha roja se enmarca el tornillo que debes apretar al final para que quede asegurado el eje

Para el siguiente paso necesitamos el otro servo motor Mg996r

Puede susar tornillos perforantes para asegurar el servo motor a la pieza, ya que la impresion no cuenta con los agujeros de cada servo
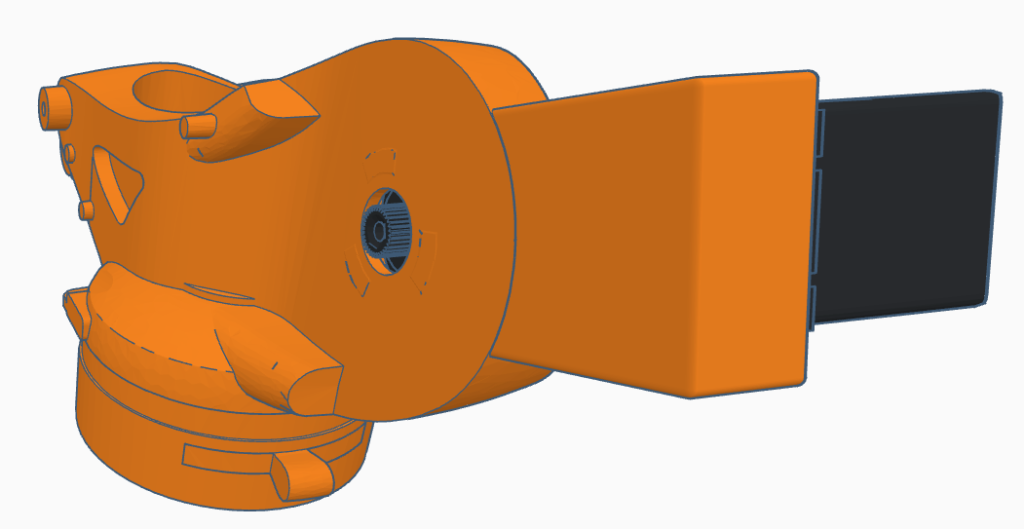
De la misma manera que al ensamblar la base, debes usar el engranaje que viene en el mismo paquete del servo motor y centrarla en la siguiente pieza
Debe quedar algo similar a la siguiente foto
Continuamos con las siguiente pieza, se deben usar 2 servo motores sg90, antes de emsamblar al paso previo.
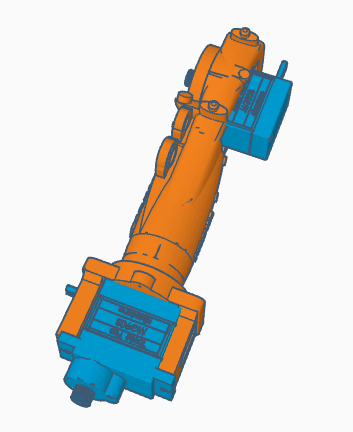
Luego se debe alinear con la anterior pieza armada, puedes usar cualquiera de los engranajes que vengan en el paquete del sg90.

Finalmente podemos comenzar con el armado de la pinza y ensamblaje final.
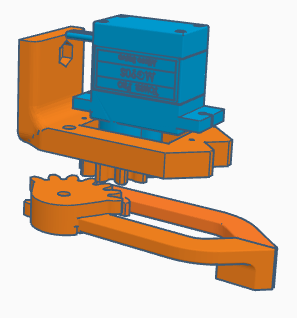
Se debe armar las pantes como aparece en la anterior image, y debe quedar similar.

Finalmente se debe asegurar a la piezas armadas de todo el brazo.

Los accesorios son opcionales, pero se puede utilizar pegante para asegurar las piezas decorativas.

7. Conexiones
Se deben soldar todos los cables de servomotores.

En mi caso utilizamos cable encauchetado de 5 hilos, esto permite colocar el mismo encauchetado alrededor del brazo kuka, para dar la sensación de tuberia hidráulica.
También recomiendo utilizar organizador negro para esconder el resto de cables y que finalmente quede como en la siguiente imagen

Espero les guste el proyecto y gracias por apoyarnos!
Siguenos en nuestras redes.